应用背景
其高科技为国内知名的机器人厂商提供声源定位解决方案,对用于安防的机器人采用麦克风阵列技术进行声源定位,极大地提高了机器人与外界交互能力。该机器人主要用于安防行业,是一种先进的自主巡逻设备,融合了多种智能技术的综合性安防平台,音频智能识别是其中一个重要功能,它可以更加有效、智能的协助机器人完成各种监控巡逻工作。
系统方案
本解决方案的创新点在于采用了麦克风阵列技术进行声源定位,鉴于客户的安防机器人是可水平360°旋转,我们在直径为600mm的机器人主体上360°设置了6个拾音孔,通过6个大小约为2mm*3mm 的MEMS麦克风组成一个小型阵列来实现声源定位。系统的定位精度与声压测试精度:方向角15°,声强 ±5dB。
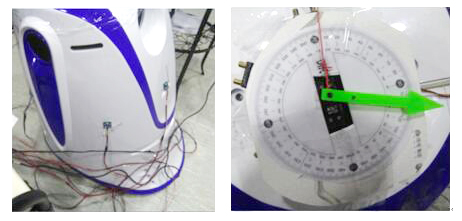
移动机器人的声源方向定位 ▼

系统优势
1、 系统组成简单:根据安防机器人的结构特点,设计出优化的小型阵列,系统小巧便于搭载。
2、 实时互动性强:采用了优化的算法,能够较好的抗混响和各种噪声,在机器人运动或声源移动等复杂环境中,机器人与外界互动的实时性强。
结果
消声室中,在距离机器人超出50cm的地方发出声源,声源按10°大小的间隔逐级变化,变换范围0~359°。在以上测试条件下,针对拍手、敲击铁块、手机间断性的发白噪声,准确率可达90%以上。
机器人声源定位测试结果 ▼
关于麦克风阵列声源定位技术
麦克风阵列声源定位技术是指利用空间分布的多路麦克风拾取声音信号,通过对麦克风的多路输出信号进行分析和处理,得到一个或多个声源的位置信息。本方案中,采用基于波束成型的声源定位算法。其高科技的麦克风阵列声源定位技术在异音异响检测、轨迹跟踪定位、语音增强、声源方位识别等领域有着成熟的应用经验。


Copyright 2019上海其高电子科技有限公司.All right reserved.
沪ICP备10043233号-1
沪ICP备10043233号-1
